PID程序中积分时间和采样时间有什么关系?积分的强度取决于积分时间常数ti,ti越小,积分越强。b .当输出不振荡时,降低积分时间常数ti,PI是比例积分控制,但它是滞后校正,我们首先要知道什么是圆周率,PID是什么?c,当输出不振荡时,增加微分时间常数Td。PID是什么意思。
1、PID调节器中比例、积分、微分各自的作用
p是投入产出比的放大倍数。I消除静态误差。PID是英文单词比例、积分和微分系数的缩写。PID调节实际上是由比例、积分、微分三种调节方式组成,它们各自的作用如下:比例调节:它是按比例对系统的偏差作出反应,一旦系统出现偏差,比例调节就会立即产生调节以减小偏差。

积分调节的作用是使系统消除稳态误差,提高无误差度。因为有误差,所以进行积分调整,直到没有差异为止,积分调整停止,积分调整输出一个恒定值。积分的强度取决于积分时间常数ti,ti越小,积分越强。反之,如果Ti较大,则积分效应较弱,加入积分调节会降低系统的稳定性,减缓动态响应。积分作用通常与另外两个调节规律结合起来形成PI调节器或PID调节器。

2、PID各参数的一般原则、调整方法和步骤是什么?
PID调试的一般原则:a .在输出不振荡的情况下,提高比例增益p。b .当输出不振荡时,降低积分时间常数ti。c,当输出不振荡时,增加微分时间常数Td。一般可以通过理论计算确定,但误差太大。目前应用最广泛的工程整定方法有:经验法、衰减曲线法、临界比例带法和响应曲线法。每种方法的一般流程如下:1 .确定比例增益P时,首先去掉PID的积分项和微分项,一般用Ti0和Td0(详见PID的参数设置说明)进行PID纯比例调节。
3、PID是什么意思?
PI是比例积分控制,但它是滞后校正。你首先要知道什么是圆周率。PID(比例积分微分)是一个数学和物理术语。目前,工业自动化水平已经成为衡量各行各业现代化水平的重要标志。同时,控制理论的发展经历了经典控制理论、现代控制理论和智能控制理论三个阶段。

自动控制系统可分为开环控制系统和闭环控制系统。控制系统包括控制器、传感器、发送器、致动器和输入/输出接口。控制器的输出通过输出接口和执行器加到被控系统上;控制系统的被控量通过传感器和变送器以及输入接口送到控制器。不同的控制系统有不同的传感器、变送器和执行器。例如,压力控制系统应该使用压力传感器。电加热控制系统的传感器是一个温度传感器。

4、什么是PID?
PID(进程标识)是指进程标识号,即进程标识符。每次在操作系统中打开程序时,都会创建一个进程ID,即PID。1.PIDportID:在STP(生成树协议)中,如果端口收到的BPDU中的BID和pathcost相同,比较PID选择被阻塞的端口。数字电视复用系统中的术语PID(PacketIdentifier)就像是一个文件的文件名,我们可以称之为“标识码传输包”。
5、PID程序中积分时间与采样时间是什么关系?
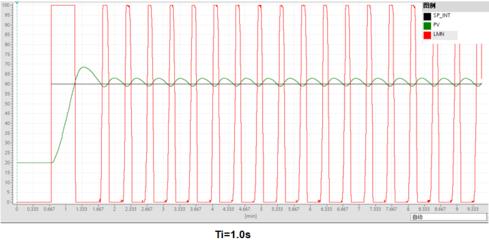
首先澄清一个概念:采样时间和控制周期不是同一个概念。如果一定要,那么根据采样定律,控制或采样周期应小于采样值变化周期的0.10.2倍。如果PV变化过程需要50秒,则采样或控制周期应小于510秒。为了计算方便,我们一般取0.52秒,以此来取PID参数。

6、pid什么意思
PID是比例、积分、微分的缩写。1比例调节功能:按比例反映系统的偏差,一旦系统出现偏差,比例调节立即产生调节功能,减少偏差。比例大可以加快调节速度,减少误差,但比例过大会降低系统的稳定性,甚至造成系统的不稳定。2积分调节功能:是使系统消除稳态误差,提高无误差程度。因为有误差,所以进行积分调整,直到没有差异为止,积分调整停止,积分调整输出一个恒定值。

反之,如果Ti较大,则积分效应较弱,加入积分调节会降低系统的稳定性,减缓动态响应。积分作用通常与另外两个调节规律结合起来形成PI调节器或PID调节器。3微分调节:微分调节反映的是系统偏差信号的变化率,具有预测性,可以预测偏差变化的趋势,所以可以产生超前控制,在偏差形成之前就已经被微分调节消除了。因此,可以提高系统的动态性能。当选择适当的微分时间时,可以减少超调和调整时间。
7、pid积分时间和增值怎么填
1。增量式pid调节参数的设置技巧PID增量算法的离散化公式为△u(k)u(k)u(k1)△u(k)KP[e(k)e(k1)]KIE(k)KD[e(k)2e(k1)e(k2)。确定比例系数Kp在确定比例系数Kp时,先去掉PID的积分项和微分项,可以使Ti0和Td0变成纯比例调节。
记录此时的比例系数Kp,并将PID的比例系数Kp设置为当前值的60% ~ 70%。(2)确定积分时间常数在比例系数Kp确定后,设定一个较大的积分时间常数Ti,然后逐渐减小Ti,直到系统振荡,然后反过来,逐渐增大Ti,直到系统振荡消失,记录此时的ti,并将PID的积分时间常数Ti设定为当前值的150% ~ 180%。